Robot world models¶
This is why strands-diffusers exists. A world model doesn't just paint a believable future — it predicts the robot actions that produce it. NVIDIA Cosmos is the headline: one call returns a future video, an optional sound track, and a normalized action tensor your controller can run.
Every clip below is a real nvidia/Cosmos3-Nano rollout (bf16/cuda) from a
single use_diffusers call — not a placeholder.

Action-policy rollouts¶
Same robot, same starting observation — different task prompt, different
imagined future and different predicted actions. This is the policy mode:
condition on a first observation, give it a task, get back the world it would
create and the action chunk (1, 16, 10) that gets there.
-
"Put the pot to the left of the purple item."

-
"Pick up the cloth and place it in the bowl."
-
"Move the gripper toward the metal pan and grasp the handle."

-
"Open the drawer and place the spoon inside."

-
"Wipe the surface with the cloth in a circular motion."

-
text-to-world (no action conditioning)

from strands_diffusers import use_diffusers
# 1) build an action condition from an observation video (low-level `call`)
use_diffusers(action="call", target="CosmosActionCondition",
parameters={"mode": "policy", "chunk_size": 16,
"domain_name": "bridge_orig_lerobot",
"resolution_tier": 480, "video": "robot.mp4",
"view_point": "ego_view"},
cache_key="cond")
# 2) run the world-foundation pipeline, threading the cached condition in
use_diffusers(action="run", pipeline="Cosmos3OmniPipeline",
model="nvidia/Cosmos3-Nano",
parameters={"prompt": "Put the pot to the left of the purple item.",
"action": "cached:cond", "fps": 5,
"num_inference_steps": 30, "guidance_scale": 1.0},
dtype="bfloat16", device="cuda")
Each call above returned a world video (17, 480, 640, 3) and an action chunk
(1, 16, 10), normalized to [-1, 1].
The headline: world + action from one call¶

Three action modes¶
Cosmos exposes the full physical-AI loop through one CosmosActionCondition —
the same object, three directions through the world model:

flowchart LR
subgraph In["conditioning"]
F["first frame"]
P["task prompt"]
RA["raw actions"]
OV["observed video"]
end
F --> Policy
P --> Policy
F --> FD
RA --> FD
OV --> ID
subgraph Modes["CosmosActionCondition"]
Policy["policy"]
FD["forward_dynamics"]
ID["inverse_dynamics"]
end
Policy --> WV["world video<br/><small>.mp4</small>"]
Policy --> AC["action chunk<br/><small>.json · [-1,1]</small>"]
FD --> WV
ID --> AC| mode | conditioning | predicts | use it for |
|---|---|---|---|
policy |
first frame + task prompt | future video + actions | "what should the robot do?" |
forward_dynamics |
first frame + given raw_actions |
future video | "what happens if I run these actions?" |
inverse_dynamics |
an observed video | the actions between frames | "what actions produced this?" |
# forward dynamics: roll the world forward from actions you already have
use_diffusers(action="call", target="CosmosActionCondition",
parameters={"mode": "forward_dynamics", "chunk_size": 16,
"domain_name": "agibotworld", "resolution_tier": 480,
"image": "first_frame.png", "raw_actions": chunks},
cache_key="fd")
# inverse dynamics: recover the actions from a video you observed
use_diffusers(action="call", target="CosmosActionCondition",
parameters={"mode": "inverse_dynamics", "chunk_size": 16,
"domain_name": "bridge_orig_lerobot",
"video": "observed.mp4"}, cache_key="id")
Inverse dynamics, seen¶
Feed an observed robot video; Cosmos reconstructs the world and infers the action chunk that connects the frames. Observed input (left) → model rollout (right):




See the motion¶
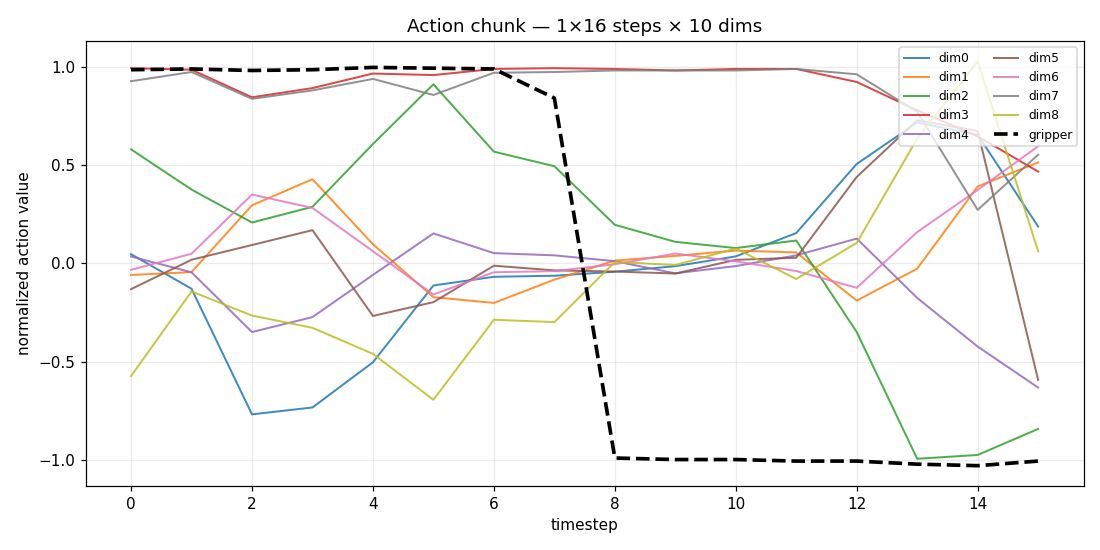
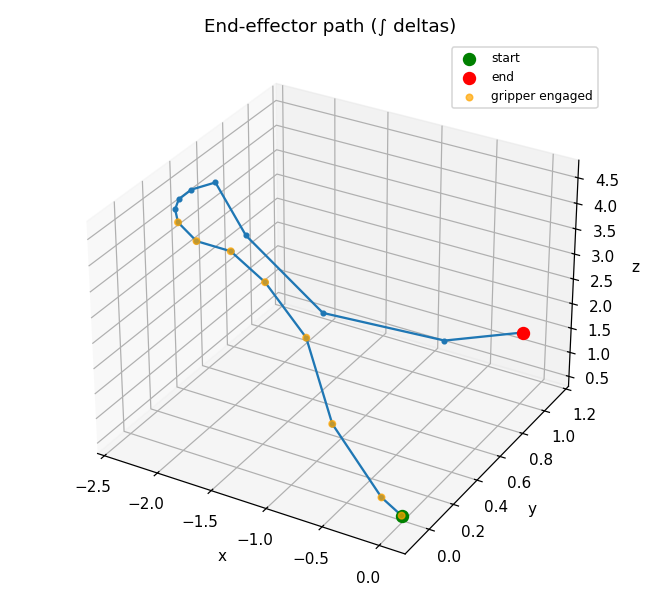
use_diffusers(action="visualize", ...) turns any action chunk into plots and an
animation so you can read the trajectory before you ever touch hardware:
| time-series (every dim, gripper highlighted) | end-effector path (dims 0–2) |
|---|---|
 |
 |
use_diffusers(action="visualize", inputs=action_chunk, parameters={"fps": 8})
# -> timeseries.png, trajectory.png, animation.mp4
What comes back¶
A Cosmos Cosmos3OmniPipelineOutput carries three fields, and the serializer
writes each to the right artifact — no opaque repr strings:
| field | artifact | notes |
|---|---|---|
video |
.mp4 |
future world, via export_to_video |
sound |
.wav |
optional audio track |
action |
.json |
normalized [-1, 1], shape [num_chunks, T, action_dim] |
{
"type": "action",
"chunk_shape": [16, 10],
"num_chunks": 1,
"path": "/tmp/strands_diffusers/action_*.json"
}
The .json is the model-normalized chunk (values in [-1, 1]). Feed it straight
to your embodiment's un-normalizer and controller. Values are preserved exactly
(no lossy clipping); bf16 tensors are upcast to f32 before serialization.
The WFM family¶
use_diffusers(action="wfm") lists every world-foundation / action-capable
pipeline diffusers ships — discovered at runtime, never hardcoded:
use_diffusers(action="wfm")
# ['Cosmos2TextToImagePipeline', 'Cosmos2VideoToWorldPipeline',
# 'CosmosTextToWorldPipeline', 'CosmosVideoToWorldPipeline',
# 'HunyuanVideoPipeline', 'WanImageToVideoPipeline', 'WanPipeline', ...]
27 world-foundation models today; the list grows automatically as diffusers adds new architectures.
Reproduce these¶
The rollout gallery above is generated by a real, GPU script:
pip install 'git+https://github.com/huggingface/diffusers' --no-deps --target /tmp/dmain
PYTHONPATH=/tmp/dmain python examples/generate_wfm_rollouts.py
See also examples/cosmos_action_policy.py
for the single-rollout walkthrough with a graceful CPU/no-GPU fallback.