strands-diffusers¶
One tool. Any diffusion model. Even robot brains.¶
use_diffusers gives a Strands agent every HuggingFace diffusers pipeline —
images, video, audio, 3D, and the one that matters most: robot world models
that output runnable actions.
text · image · video · robot state IN → image · video · audio · actions · 3D OUT

Start with robots¶
A world model doesn't just imagine a video of the future — it predicts the
robot actions that get there. NVIDIA Cosmos answers three questions, and one
use_diffusers call answers each:

-
What should the robot do?

Give it a camera frame and a task. Get back the imagined future and the action chunk to execute. (the policy)
-
What happens if I run these actions?

Give it a start frame and a set of actions. Get back the world they would produce. (forward dynamics)
-
What actions made this video?

Give it a video you recorded. Get back the actions that connect the frames. (inverse dynamics)
Every clip above is a real nvidia/Cosmos3-Nano rollout — one call returned a
world video (17, 480, 640, 3) and an action chunk (1, 16, 10), saved straight
to .mp4 + .json (normalized [-1, 1], ready for your controller).
from strands_diffusers import use_diffusers
# "What should the robot do?" — one call, video + actions back
use_diffusers(action="run", pipeline="Cosmos3OmniPipeline",
model="nvidia/Cosmos3-Nano",
parameters={"prompt": "Put the pot left of the purple item.",
"action": "cached:cond"},
dtype="bfloat16", device="cuda")
You can even see the motion before touching hardware:
| every joint over time | the gripper's path |
|---|---|
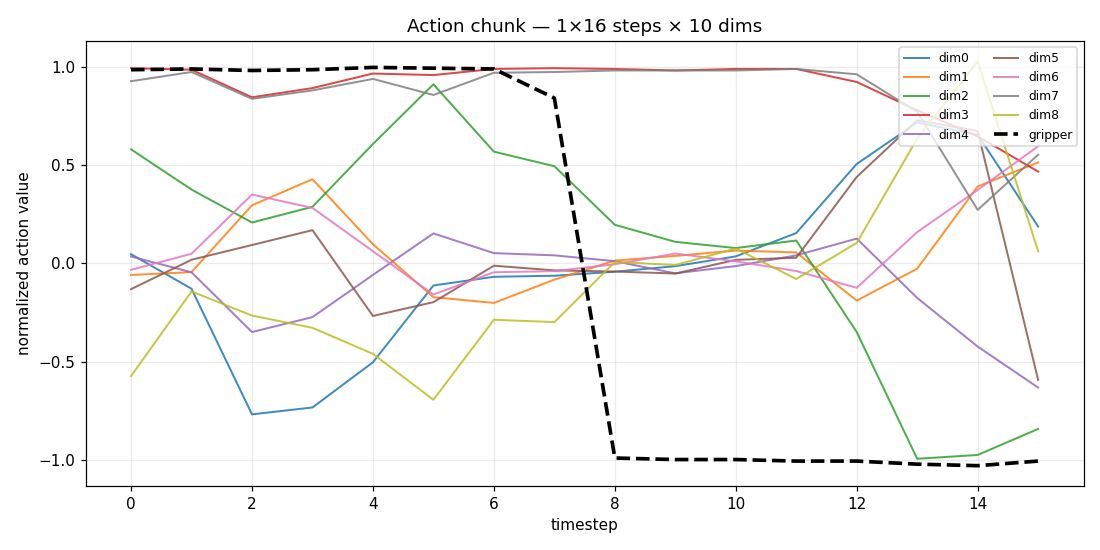 |
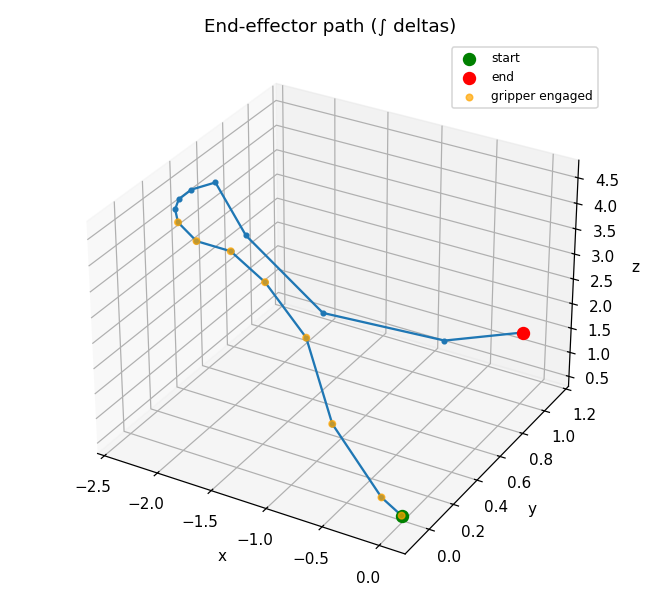 |
The same tool does everything else¶
Robots are the headline, but use_diffusers is one door to the whole diffusers
library. Same call, different pipeline:
-
text → image

-
text → video

-
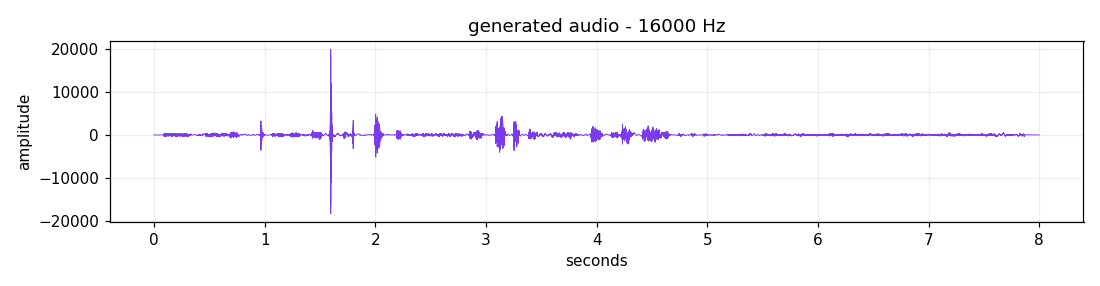
text → audio
-
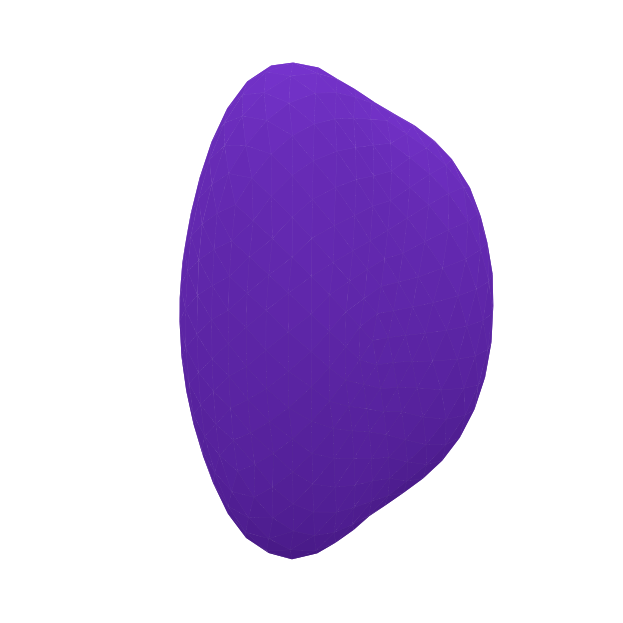
text → 3D mesh
How it stays simple¶
You never memorize class names. The agent asks the library what it has, picks a pipeline, runs it, and hands you back file paths.
from strands import Agent
from strands_diffusers import use_diffusers
agent = Agent(tools=[use_diffusers])
agent("Generate an image of a robot arm in a kitchen")
agent("Run a Cosmos rollout on robot.mp4 and give me the actions")
The list of pipelines is read from the installed diffusers at runtime — so when
the library adds a model, it just works, with nothing to update here. Same idea as
use_aws, use_lerobot, and use_transformers: ask, don't hardcode.
Next¶
- Robot world models — the full action story, every mode, real rollouts
- Quickstart — installed and running in five lines
- Gallery — every output, nothing faked