The tool: use_transformers¶
One @tool, the whole library. Three modes: discover, run, call.
Nothing is hardcoded - the task list is read from transformers at runtime.
flowchart LR
AG["🤖 Agent"] --> UT["🛠️ use_transformers"]
UT --> DISC["🔍 discover"]
UT --> RUN["▶️ run"]
UT --> CALL["⚙️ call"]
DISC --> REG["📚 transformers<br/><i>read at runtime</i>"]
RUN --> REG
CALL --> REG
classDef a fill:#7C5CFF22,stroke:#7C5CFF,stroke-width:1.5px,color:#7C5CFF;
classDef t fill:#22D3EE1f,stroke:#22D3EE,stroke-width:1.5px,color:#0F91A6;
classDef r fill:#8B8B9414,stroke:#8B8B9466,stroke-width:1.5px,color:#6B6B76;
class AG a; class UT,DISC,RUN,CALL t; class REG r;Discover¶
Find the right task and model without memorizing the library.
use_transformers(action="tasks") # every task + modality + default model
use_transformers(action="task_info", task="image-text-to-text")
use_transformers(action="inspect", target="pipeline") # signature of anything
Run¶
High-level pipelines. inputs takes a path, URL, base64, text, dict, or array.
use_transformers(action="run", task="automatic-speech-recognition", inputs="clip.wav")
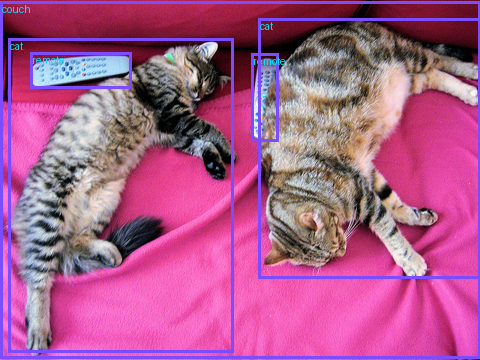
use_transformers(action="run", task="object-detection",
inputs="https://images.cocodataset.org/val2017/000000039769.jpg")
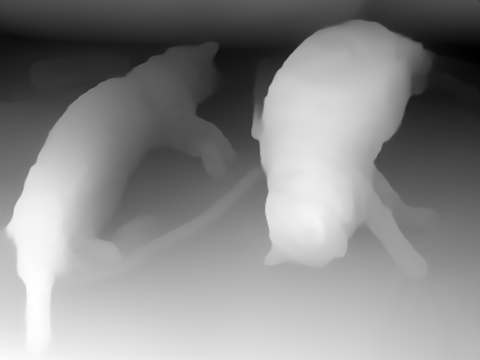
Vision tasks return structured data and save an image you can look at:
| input | detection | depth |
|---|---|---|
 |
 |
 |
$ uv run vision.py
detections: ['remote', 'remote', 'couch', 'cat', 'cat']
depth map saved to: /tmp/strands_transformers/image_*.png
Call¶
For anything pipelines don't cover - VLA models, custom methods. Load components once, cache them, chain calls.
use_transformers(action="call", target="AutoProcessor.from_pretrained",
parameters={"pretrained_model_name_or_path": MODEL}, cache_key="proc")
use_transformers(action="call", target="cached:vla.predict_action",
parameters={"**": "cached:inputs", "unnorm_key": "bridge_orig"})
Cache shorthands
cached:key is a live object, cached:key.method calls a method on it, and
"**" unpacks a cached mapping into kwargs - the idiomatic
model.predict_action(**processor(prompt, image)).
Every call returns {status, content, data, artifacts} - data is always
JSON-safe. Full signatures in the API reference.